جلسه دفاع پایان نامه: سیدحسن سعادتنیا، مهندسی مکاترونیک
خلاصه خبر:
عنوان پایان نامه: طراحی و ساخت عملگر کنشپذیر ارتز زانو با قابلیت ذخیره انرژی
ارائهکننده: سیدحسن سعادتنیا استاد راهنما: دکتر سجاد ازگلی استاد ناظر داخلی: دکتر مجید ساده دل استاد ناظر خارجی: دکتر آشتیانی تاریخ: 1403/11/02 ساعت: 13:30 مکان: دانشکده فنی و مهنسی، بلوک شماره شش، آزمایشگاه 36-6
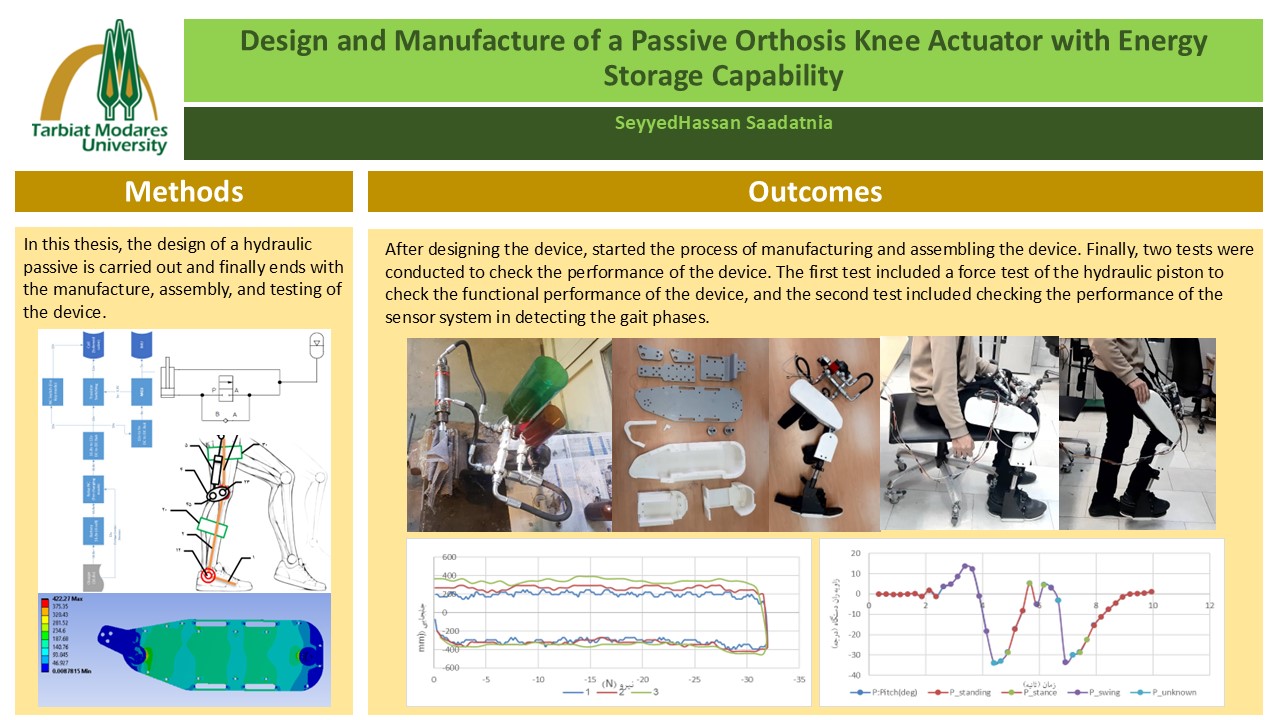
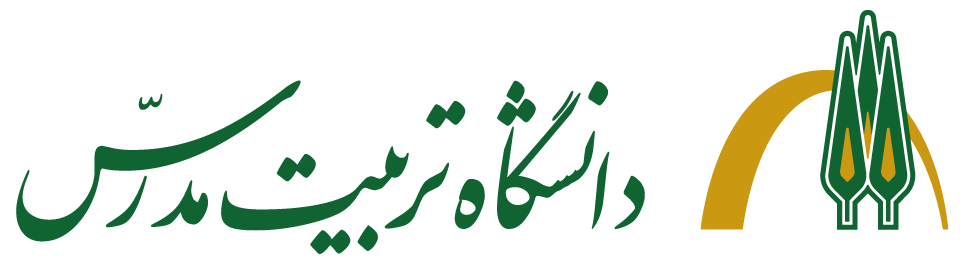
چکیده: ارتزها وسایل کمک حرکتی هستند که افراد دچار اختلال حرکتی، برای بهبود حرکت از آنها استفاده میکنند. در میان انواع مختلف ارتزها، ارتز زانو-مچ-کف پا (کافو) با توجه به پشتیبانی از دو مفصل زانو و مچ پا، بخش قابل توجهی از بیماران را پوشش میدهند. در این پایاننامه به طراحی و ساخت یک ارتز زانو-مچ-کف پا پرداخته شدهاست که از سامانه هیدرولیکی برای تامین نیرو و از سامانه الکترونیکی برای تشخیص مراحل چرخه گامبرداری استفاده میکند. این ارتز، برخلاف غالب ارتزهای کنترل ایستایی و دینامیکی، از سامانه هیدرولیکی به صورت کنشپذیر استفاده میکند و به کمک یک حسگر IMU، در حین حرکت فرد، مداخله میکند. دلیل استفاده از سامانه هیدرولیکی، توانایی ذاتی آن در میرا کردن حرکت، به همراه قابلیت اطمینان بالا است که منجر به ایجاد چرخه گام برداری نزدیک به فرد سالم میشود. در این پایاننامه، مراحل طراحی دستگاه، از طراحی مفهومی تا طراحی جزئی پیموده شد و هر سه حوزه سامانه الکترونیکی، مدار هیدرولیکی و سازه مکانیکی مورد بحث قرار گرفت. سپس مطابق طراحی انجام شده، فرایند ساخت و مونتاژ دستگاه صورت گرفت و آزمایشهایی برای بررسی عملکرد دستگاه انجام شد. نتایج آزمایشهای این پایاننامه نشان میدهد اولاً قابلیت ساخت ارتزهای به مراتب سبکتر و کارآمدتر با سامانه هیدرولیکی وجود دارد؛ ثانیاً جک هیدرولیکی مورد استفاده، نیازمند کمترین نیروی اصطکاک داخلی برای ایفای نقش است و ثالثاً تشخیص مراحل تابخوری و ایستایی از چرخه گامبرداری در پیادهروی بر روی سطح هموار، به کمک تنها یک حسگر IMU، با دقت مناسبی امکان پذیر است.